
刚体属性
Default rigid body panel.
- Type
Role of the rigid body in the simulation.Active objects can be simulated dynamically, passive object remain static.
- Active
- Object is directly controlled by simulation results.The possibility to select this type also available with _Add Active_button in the Physics tab of the Tool Shelf.
- Passive
- Object is directly controlled by animation system.Thus, this type is not available for .The possibility to select this type also available with Add Passive buttonin the Physics tab of the Tool Shelf.
- Dynamic
- Enables/disables rigid body simulation for object.
- Animated
- Allows the rigid body additionally to be controlled by the animation system.
- Mass
Specifies how heavy the object is and "weights" irrespective of gravity.There are predefined mass preset available with the Calculate Mass buttonin the Physics tab of the Tool Shelf.
- Calculate Mass
- Automatically calculate mass values for rigid body objects based on its volume.There are many useful presets available from the menu, listing real-world objects.
Note
Also you can have Custom mass material type,which is achieved by setting a custom density value (kg/m3).
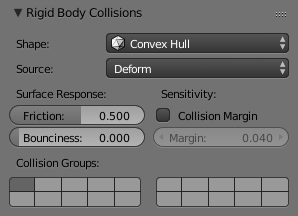 Rigid Body Collisions panel.
Rigid Body Collisions panel.
The Shape option determines the collision shape of the object.The changing collision shape is available also with Change Shape button in the Physics tab of the Tool Shelf.
Primitive Shapes
These are best in terms of memory/performance but do notnecessarily reflect the actual shape of the object.They are calculated based on the object's bounding box.The center of gravity is always in the middle for now.Primitive shapes can be shown in the viewport byenabling Bounds in the Object ‣ Display panel.
- Box
- Box-like shapes (e.g. cubes), including planes (e.g. ground planes).The size per axis is calculated from the bounding box.
- Sphere
- Sphere-like shapes. The radius is the largest axis of the bounding box.
- This points up the Z axis.
- Cylinder
- This points up the Z axis.The height is taken from the Z axis, while the radius is the larger of the X or Y axes.
- Cone
- This points up the Z axis.The height is taken from the Z axis, while the radius is the larger of the X or Y axes.Mesh-Based Shapes
These are calculated based on the geometry of the object so they are a better representation of the object.The center of gravity for these shapes is the object origin.
- Convex Hull
- A mesh-like surface encompassing (e.g. shrink-wrap over) all vertices (best results with fewer vertices).Convex approximation of the object, has good performance and stability.
- Mesh
- Mesh consisting of triangles only, allowing for more detailed interactions than convex hulls.Allows to simulate concave objects, but is rather slow and unstable.
- Base
- The base mesh of the object.
- Deform
Includes any deformations added to the mesh (shape keys, deform modifiers).
- Deforming
- Mesh shapes can deform during simulation.
- Final
- Includes all deformations and modifiers.
- Surface Response
- Friction
- Resistance of object to movement. Specifies how much velocity is lost when objects collide with each other.
- Bounciness
- Tendency of object to bounce after colliding with another (0 to 1) (rigid to perfectly elastic).Specifies how much objects can bounce after collisions.
- Collision Groups
- Allows rigid body collisions allocate on different groups (maximum 20).
- Threshold of distance near surface where collisions are still considered (best results when non-zero).The collision margin is used to improve performance and stability of rigid bodies. Depending on the shape, it behavesdifferently: some shapes embed it, while others have a visible gap around them.
The margin is embedded for these shapes:
- Sphere
- Box
- Capsule
- Cylinder
Convex Hull: Only allows for uniform scale when embedded.The margin is not embedded for these shapes:
Cone
- Active Triangle Mesh
- Passive Triangle Mesh: Can be set to 0 most of the time.
Reference
Used to control the physics of the rigid body simulation.This panel is available only for Active type of rigid bodies.
- Deactivation
- Enable Deactivation
- Enable deactivation of resting rigid bodies. Allows object to be deactivated during the simulation(improves performance and stability, but can cause glitches).
- Start Deactivated
- Starts objects deactivated. They are activated on collision with other objects.
- Linear Velocity
- Specifies the linear deactivation velocity below which the rigid body is deactivated and simulation stopssimulating object.
- Angular Velocity
- Specifies the angular deactivation velocity below which the rigid body is deactivated and simulation stopssimulating object.
- Damping
- Translation
- Amount of linear velocity that is lost over time.
- Rotation
- Amount of angular velocity that is lost over time.

